
4. 计算流程
OceanKit针对海洋平台结构进行力学分析的基本流程包括:
- 建立结构分析项目(目前仅支持深海软管的动力学分析)
- 结构参数化建模
- 模型网格生成
- 设置材料属性
- 定义约束和边界载荷
- 设置求解参数
- 执行计算任务
- 对计算结果进行显示和分析
- 生成分析报告
下面分别对以上流程1-7进行详细说明,流程8-9则在第5节中进行说明 ,这里主要描述相关概念和参数,具体的软件界面操作请参考6. 界面操作一节。
4.1 软管动力学分析项目
在开始每一种结构计算前,需要建立一个相应的项目,这个项目包含了分析所定义的数据。 对于深海管道模拟项目,它主要包括以下数据分类:
- 模型尺寸
- 网格剖分
- 材料属性
- 载荷定义
- 求解控制
- 计算任务
这些分类的具体数据将在下面的流程介绍中进行说明。项目可以以文件的形式进行保存,便于之后打开或修改。
4.1.1 结构参数化建模
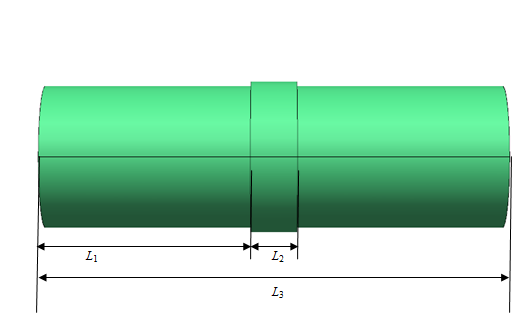
建立一个管道模型,需要设置其几何参数并选择对称类型。其中几何参数包括管道的全长、管道的直径、管道壁厚、止屈器长度、止屈器壁厚以及止屈器的位置。从管道的正视图和左视图,可以明确各参数的物理意义。
管道的正视图如下:
管道的左视图如下:

各符号参数对应的含义如下表
| 参数含义 | 止屈器位置 | 止屈器长度 | 管道总长 | 管道内径 | 管道壁厚 | 止屈器壁厚 |
|---|---|---|---|---|---|---|
| 参数符号 | L1 | L2 | L3 | d | t1 | t2 |
4.1.2 模型网格生成
在OceanKit中有四种生成网格的方式:映射-给定点数、映射-给定尺寸、自适应、从文件导入,用户可以自行选择划分网格的方式,并设置轴向、环向、径向以及止屈器径向网格数目。
- 映射-给定点数:通过设置模型的结点数量进行网格划分
- 映射-给定点数:通过设置模型的网格尺寸进行网格划分
- 自适应:智能划分,软件将自动根据模型各位置的尺寸选择一个比较合适的网格尺寸,进行网格划分
- 从文件导入:OceanKit支持其他有限元软件的网格划分,这种方式需要先生成几何模型对应的网格文件,包括结点坐标和网格拓扑关系,且为txt文件。
4.1.3 材料属性设置
在本软件中材料的本构模型采用考虑强化和下降段的三折线模型,需要设置的材料属性包括弹性模量、剪切模量、切线模量、屈服强度、拉伸极限和密度,其中弹性模量、剪切模量和切线模量的单位默认为 Gpa,屈服强度和拉伸极限的单位默认为 Mpa,密度的单位默认为kg/m3。
材料各参数的建议值如下表
| 参数名称 | 弹性模量 | 剪切模量 | 切线模量 | 屈服强度 | 拉伸极限 | 密度 |
|---|---|---|---|---|---|---|
| 建议值 | 210 Gpa | 78 Gpa | 1.5 Gpa | 448 Mpa | 598 Mpa | 7850 kg/m3 |
4.1.4 约束和边界载荷
在进行管道分析时,需要进行约束和边界载荷设置:
- 约束设置:在端面需要进行6个方向自由度的约束设置,6个自由度包括X、Y、Z三个方向的平动和转动。
- 载荷设置:软件支持位移加载和力的加载,一般来说这里的力和位移加载在端面的结点上,通过调整加载时程数据,可以控制加载顺序以及加载速率。
- 压力设置:除了端部的约束和载荷,管道的内外表面还会承受一定的压力,需要在内外表面单元上加载压力,一般来说,内表面的压力可以看成 0 Mpa。同样,加载压力时可以通过调整加载时程数据,控制加载顺序以及加载速率。
在进行载荷和压力设置时,常见的加载方式为斜坡加载,即前一半时间线性加载到最大值,后一半时间稳定。
4.1.5 设置求解参数
4.1.1-4.1.4基本完成有限元力学模型的建模,此时要进行求解,需要设置求解参数,求解参数包括计算时长、时间步长、是否刚性接触、各个方向的阻尼。
- 计算时长:实际物理时长,时长应大于计算达到稳定所需时长,才可以得到比较可靠的结果
- 时间步长;计算的步长,根据模型进行设置,这一步长取太大会引起求解不收敛,取太小则计算会比较耗时
- 是否刚性接触:一般默认为刚性接触
- 各个方向的阻尼:包含X、Y、Z方向的平动和转动阻尼的设置。
4.1.6 执行计算任务
提交计算任务前,需要进行任务名称、任务工作路径、结果输出次数和并行进程数的设置。 设置完后,可以生成求解器所需的输入文件,下表详细说明了求解器各输入文件的含义与用途,值得注意的是,求解器的输入输出文件均为txt格式。
- 输入文件一览
| 序号 | 文件名称 | 文件解释与用途 | 文件格式 |
|---|---|---|---|
| 1 | Element_Information_Solid | 单元信息 | txt |
| 2 | Ele_Node-六面体 | 单元信息,没有实质作用 | txt |
| 3 | NodeCoor | 结点坐标 | txt |
| 4 | InnerFace_PlaneEle | 内表面辅助单元拓扑信息 | txt |
| 5 | OutFace_PlaneEle | 内表面辅助单元拓扑信息 | txt |
| 6 | Material_Infor | 材料参数 | txt |
| 7 | NodeDisp_X | X方向位移载荷 | txt |
| 8 | NodeDisp_Y | Y方向位移载荷 | txt |
| 9 | NodeDisp_Z | Z方向位移载荷 | txt |
| 10 | NodeDisp_TimePoints | 施加位移载荷的插值时间点,通过 载荷时程来控制位移载荷加载速率 |
txt |
| 11 | InnerPressure | 内压 | txt |
| 12 | OutPressure | 外压 | txt |
| 13 | Constrain_Nodes | 端部结点约束 | txt |
| 14 | DampingRatio_Input_dx | X平动方向阻尼 | txt |
| 15 | DampingRatio_Input_dy | Y平动方向阻尼 | txt |
| 16 | DampingRatio_Input_dz | Z平动方向阻尼 | txt |
| 17 | DampingRatio_Input_rx | X转动方向阻尼 | txt |
| 18 | DampingRatio_Input_ry | Y转动方向阻尼 | txt |
| 19 | DampingRatio_Input_rz | Z转动方向阻尼 | txt |
| 20 | Calculate_parameters | 计算参数文件 | txt |
当以上文件都已生成时,可以调用求解器进行相关计算,计算后生成的结果文件同样为txt格式。
- 输出文件一览
以第一步为例,各输出文件含义如下表所示
| 序号 | 文件名称 | 文件解释与用途 | 文件格式 |
|---|---|---|---|
| 1 | 00001-Ele_dDisp_Local_Solid | 单元坐标系下的单元结点位移 | txt |
| 2 | 00001-EleForce_Solid | 整体坐标系下的实体单元内力 | txt |
| 3 | 00001-Elementforce | 整体坐标系下的实体单元外力 | txt |
| 4 | 00001-EleStrain_Local_Solid | 单元坐标系下的单元应变 | txt |
| 5 | 00001-EleStrain_Solid | 整体坐标系下的单元应变 | txt |
| 6 | 00001-EleStress_Local_Solid | 单元坐标系下的单元应力 | txt |
| 7 | 00001-EleStress_Solid | 整体坐标系下的单元应力 | txt |
| 8 | 00001-force | 施加在节点上的力和内力 | txt |
| 9 | 00001-NodeCoor | 节点位置和节点位移 | txt |
| 10 | 00001-NodeStrain_Solid | 整体坐标系下的节点应变 | txt |
| 11 | 00001-NodeStress_Solid | 整体坐标系下的节点应力 | txt |
| 12 | 00001-PrinVec | 单元坐标与整体坐标转换矩阵 | txt |
将求解器生成的结果文件导入OceanKit后,可以进行后处理。
No Comments